描述:I0.0已經被定義為原點傳感器輸入了,我如何使用HC0高速計數器?
圖片:
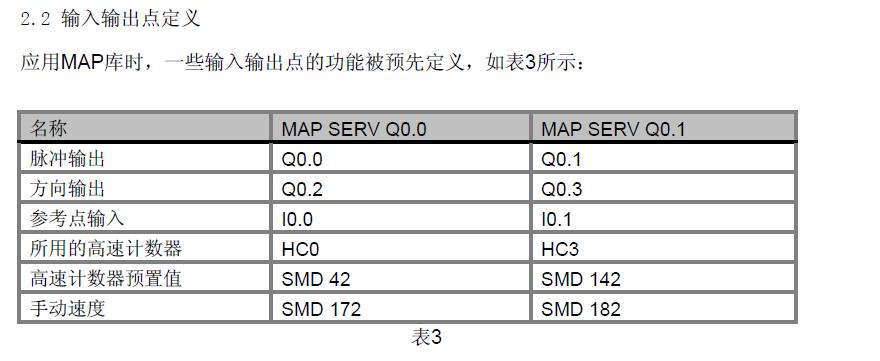
我要用S7200 MAP SERV庫,控制步進電機。本意是想讓步進電機以特定頻率,指定方向,轉。按停止鈕,或者脈沖數發送完畢時,電機停止。我剛用MAP SERV庫編了個程序,發現好多問題不知道如何解決,求大俠幫忙.
1,I0.0應該是HC0的脈沖輸入才對阿!可是被定義為參考點了。程序里如何調用高速計數器HC0,計數到VD144里的脈沖數就使M4.0置1。
2,我沒有定義參考點(原點),Q0_0_MoveVelocity這條指令能用么,他的絕對位移表示什么。我想要他以VD204里的數據做為頻率,Q0.2的方向,轉。
3,程序中,我給V180.0賦值的方法對不對,還有其他VD什么的,是那么賦值么
謝謝了,不會弄啊,著急阿!
 滬公網安備31010802001143號
滬公網安備31010802001143號

